Ubiquitous Connectivity via Autonomous Airborne Networks (AirBonnet)
While households in developed countries receive skyrocketing data
rates through optical fibers and smartphones step into the 5G era,
roughly one half of the world’s population cannot connect to the
internet. Even beyond developing economies, bringing data
connectivity to areas where it cannot currently reach would
drastically benefit applications such as the internet-of-things, smart
agriculture/forestry, wildfire suppression, search-and-rescue
missions, paramedical interventions, and emergency response handling
to name a few.
To this end, the UAVs in the targeted
technology are equipped with a communication module that connects to
the ground users on one side and to the cellular terrestrial
infrastructure on the other side. The user information may even be
relayed through multiple UAVs before reaching its destination. For
this technology to be viable, the UAVs must be able to navigate
without human supervision to locations with favorable propagation
conditions, that is, where the signals that they receive from and
transmit to the ground users and cellular infrastructure are not
significantly blocked by obstacles such as buildings or
mountains.
The key approach in this project is to
construct radio maps that describe the propagation conditions
in a certain region. Using these maps, the UAVs rely on artificial
intelligence algorithms to determine the appropriate locations and can
even adapt to changes in the user positions and connectivity
requirements as well as to coordinate with other UAVs. Our preliminary
findings already showcase the ability of artificial deep neural
networks to construct radio maps from a small number of measurements
collected by the UAVs.
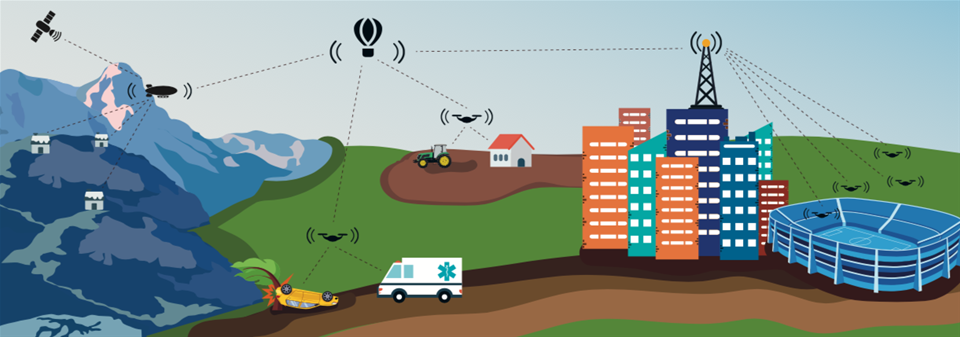 Unmanned aerial vehicles provide data connectivity to users on the ground.
Unmanned aerial vehicles provide data connectivity to users on the ground.
Project Info
Project Manager: Daniel RomeroResearchers: Jaziar Radianti
Project Period: Jan. 2021 - Dec. 2026
Funding: Norwegian Research Council, IKTPLUSS program
Partners: University of Vigo; Delft University of Technology, Gradiant
Low-Altitude Communication and Tracking (LUCAT)
By 2030, myriads of unmanned aerial vehicles (UAVs) will pervade the skies of populated areas, serving millions of people worldwide for transportation of goods, construction, agriculture, surveillance, and search-and-rescue operations to name a few. Human life will experience a profound transformation since daily tasks such as food delivery or grocery shopping will be carried out by autonomous UAVs. But before the era of UAVs can set in, a number of technical and legal challenges need to be addressed, mainly due to the safety concerns that flying vehicles pose for citizens. Technical challenges include low-altitude flight technology, sense-and-avoid capabilities, handling lift-offs and landings in urban areas as well as the initial and final meters of the trajectory, prioritizing traffic such as public service UAVs (e.g. fire fighters or police drones), and so on.
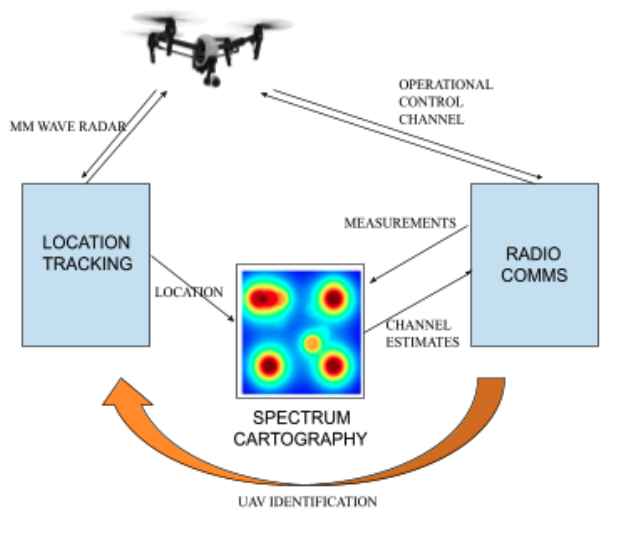
To address these challenges, the primary objective is to develop an integrated technology of communication and tracking for low-altitude autonomous operations in populated areas. Besides contributions to UAV communications as well as tracking of low-altitude flying objects, a major novelty of the research plan is to cross-fertilize these two areas towards mutual performance enhancements. In other words, a central hypothesis is that location can improve performance metrics of spectrum-cognizant communications, whereas communications may facilitate tracking of UAVs operating in low altitudes.
Project Info
Principal Investigators: Daniel Romero, Linga Cenkeramaddi, Baltasar Beferull-Lozano.Project Period: 2018 - 2023
Funding: Norwegian Research Council, IKTPluss INDNOR program
Partners: IISc Bangalore, University of Texas, Austin.